Chanyoung Ahn
Robotics | Mechanical Engineering

My Research Intersets: Dexterous Manipulation, Deformable Object Manipulation (DOM), and Sensor Fusion
I am a Robotics Researcher with a strong focus on robotic manipulation, especially in deformable object manipulation (DOM) and Dexterous Manipulation. I am currently conducting research on dexterous in-hand manipulation using haptic feedback at Prime Lab, Korea Institute of Science and Technology (KIST). I recently received my M.S. in Robotics at the Korea Advanced Institute of Science and Technology (KAIST) with the RIRO Lab, where I developed reinforcement learning policies for visuotactile-based manipulation. I recived my Bachelor’s degree in Mechanical Engineering from Pusan National University (PNU) in 2021, graduating Summa Cum Laude.
My research focuses on developing robust dexterous manipulation strategies by leveraging haptic feedback, particularly in unstructured and contact-rich environments.
See more details:
CV (PDF)
news
| May 20, 2025 | Attending ICRA in Atlanta to present 3D Tangible Display with a High-Speed Stiffness-Variable Jamming Module at the Arts in Robotics exhibition! |
|---|---|
| May 19, 2025 | Attending ICRA in Atlanta to present Effectiveness of Kinesthetic Sensing in In-Hand Rotation of Objects with an Eccentric Center of Mass at the workshop (Handy Moves: Dexterity in Multi-Fingered Hands)! |
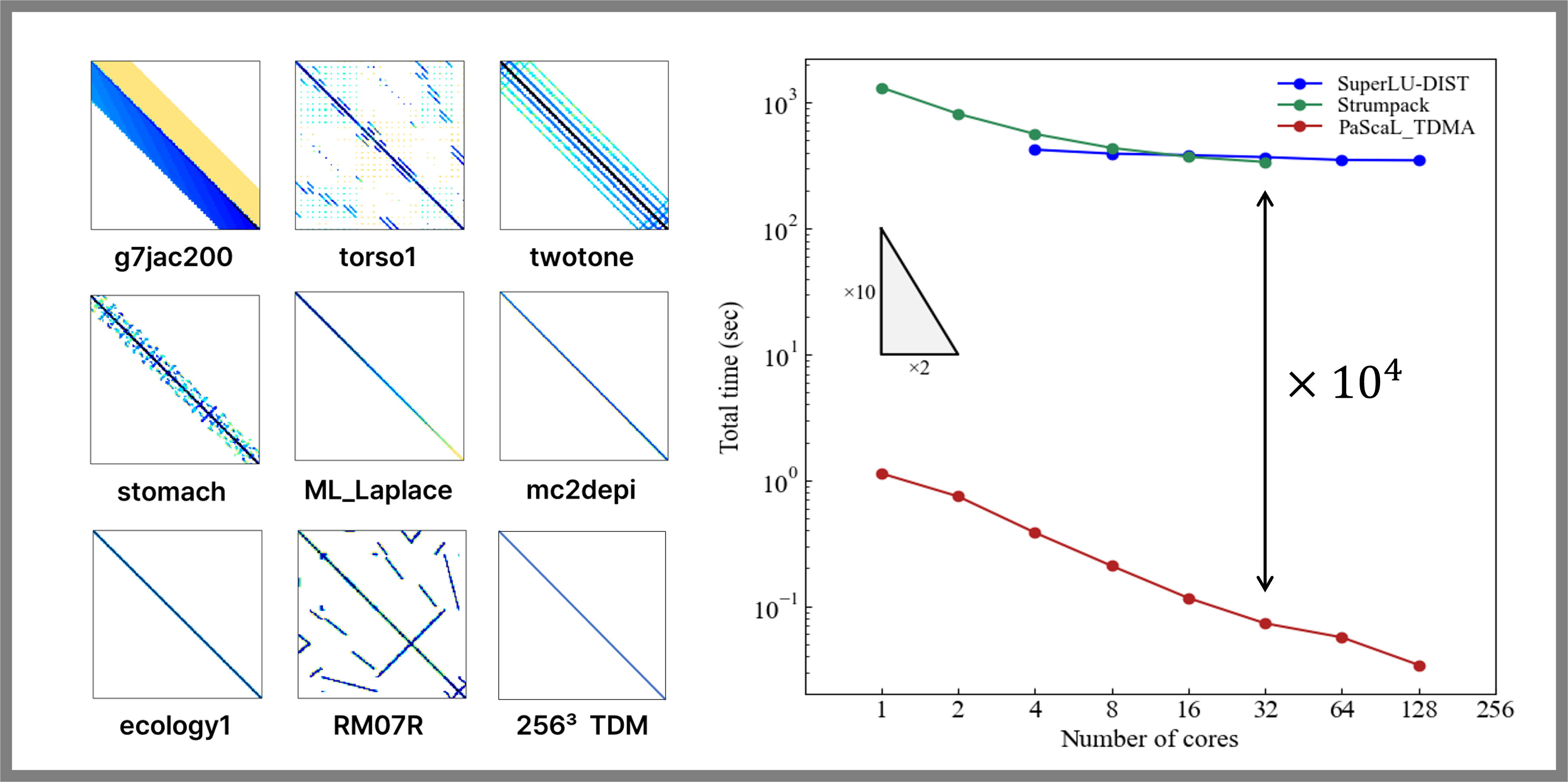
| Aug 22, 2024 | Presented a poster on the Parallel Performance Benchmark project with KISTI at CDE 2024. |
| Aug 08, 2024 | Served as an instructor for the repository workshop at KISTI |
projects
publications
-
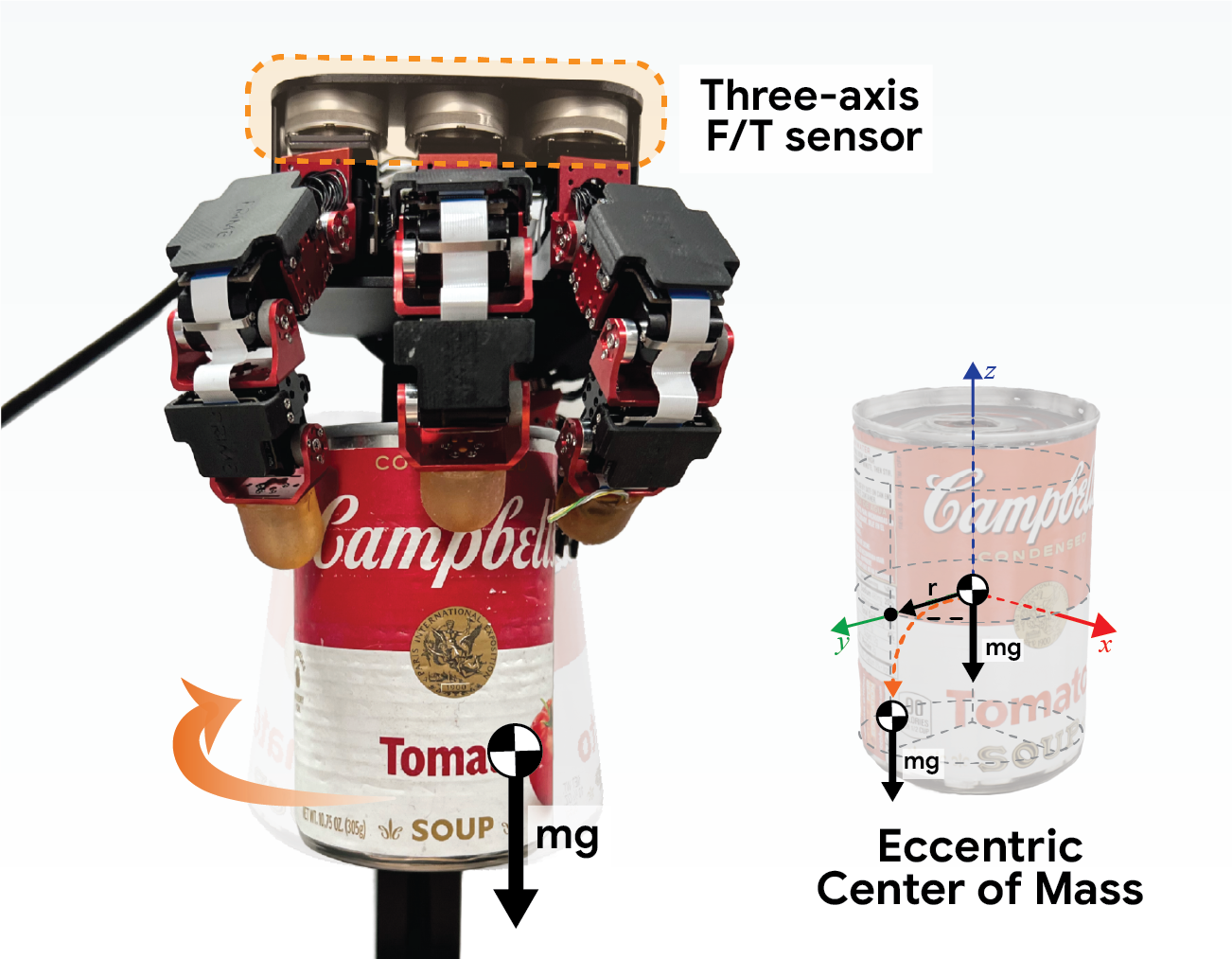 ConferenceEffectiveness of Kinesthetic Sensing in In-Hand Rotation of Objects with an Eccentric Center of MassICRA Workshop 2025
ConferenceEffectiveness of Kinesthetic Sensing in In-Hand Rotation of Objects with an Eccentric Center of MassICRA Workshop 2025 -
 ThesisPusan National University Dec 2020
ThesisPusan National University Dec 2020PNU CAPSTONE Poster Session, 3rd out of 90+ teams