Lab Project DEFTACTGYM: A Reinforcement Learning Testbed for Deformable Object Manipulation Using Visuotactile Sensory Data
Chanyoung Ahn, Bonggyeong Park, Jaehwi Jang, Minwoo Cho, Jeongho Ha, Daehyung Park
RIRO Lab @ KAIST Jan 2022
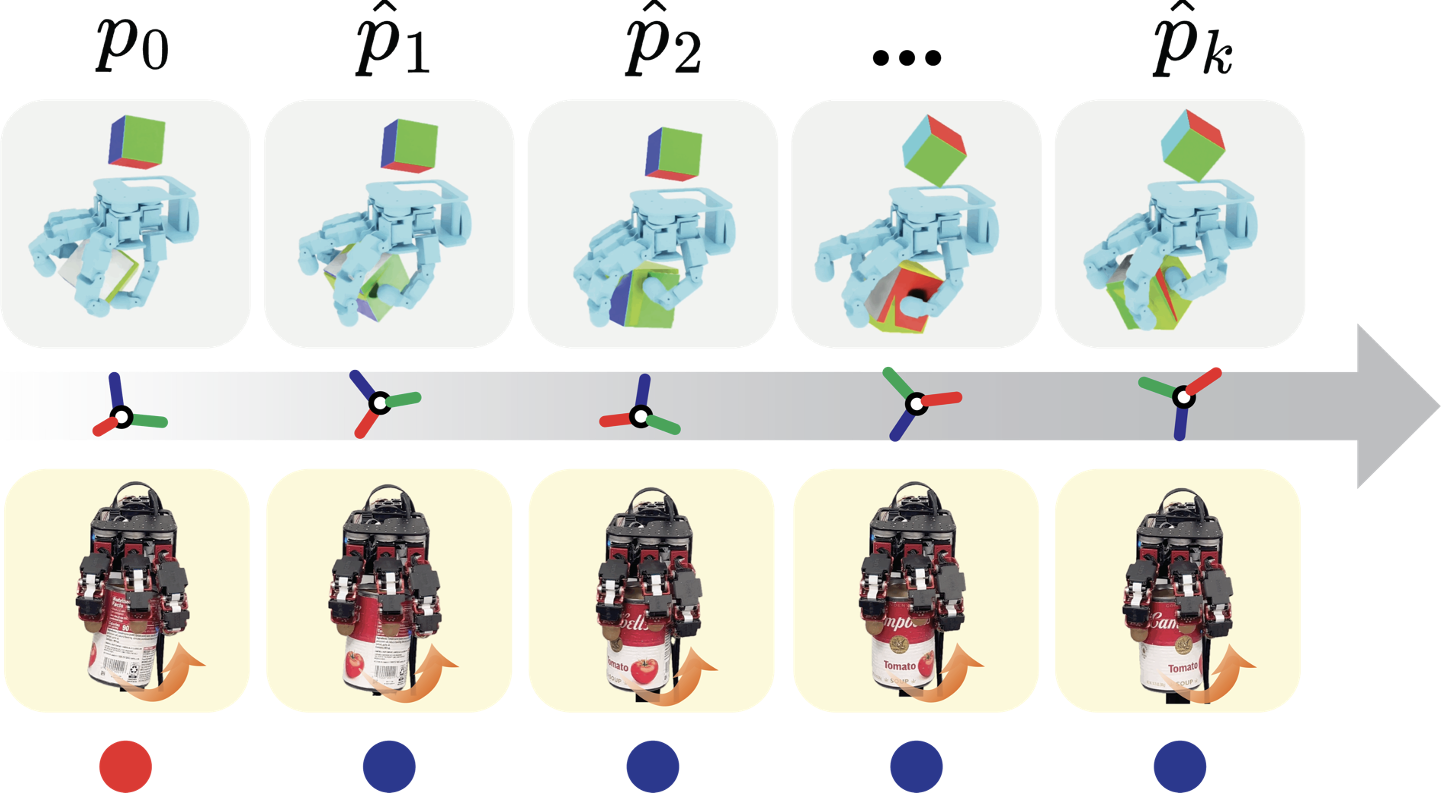
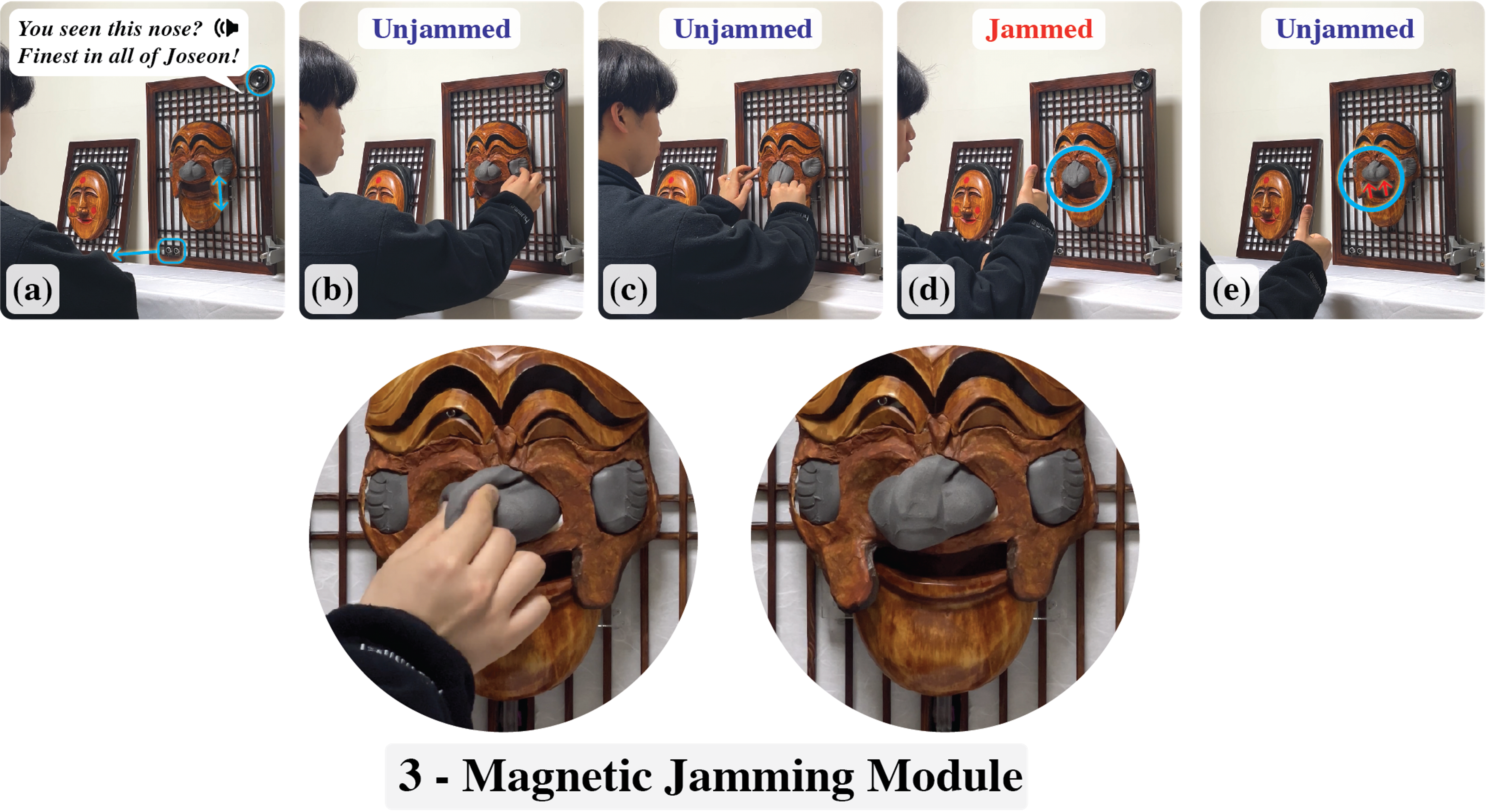
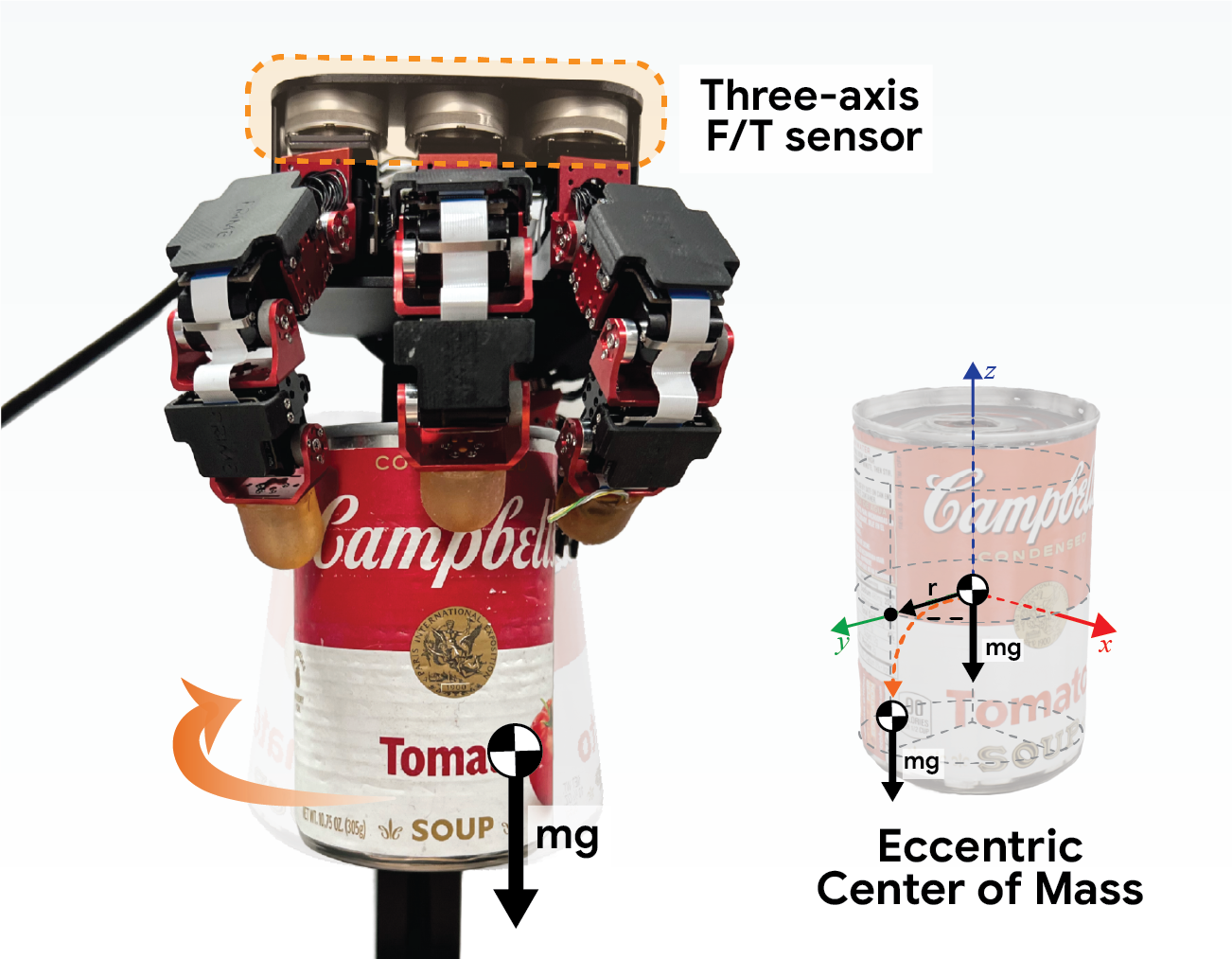
We aim to create a simulated testbed for training and assessing deformable object manipulation skills. This testbed requires tactile data to detect occluded deformation to acquire skills. In this work, we introduce a tactile testbed, DetactGym, with custom-built tactile sensors. We implement tactile sensors as a combination of a rigid trigger and a force-reading part to address the IsaacSim simulator’s inability to read contact forces in deformable. The trigger transmits the contact force to the sensor upon interaction with the target deformable. We highlight the effectiveness of tactile information over visual cues in handling deformable objects while minimizing deformation.
 Project6-DoF Grasp Generation for Mobile ManipulationCS492_IIR Final Project @ KAIST Jan 2021
Project6-DoF Grasp Generation for Mobile ManipulationCS492_IIR Final Project @ KAIST Jan 2021