ICRA 2025
Presented workshop and robot exhibition.
- Day 1 – Arts in Robotics Exhibition (May 21, 2025, 14:00–18:00)
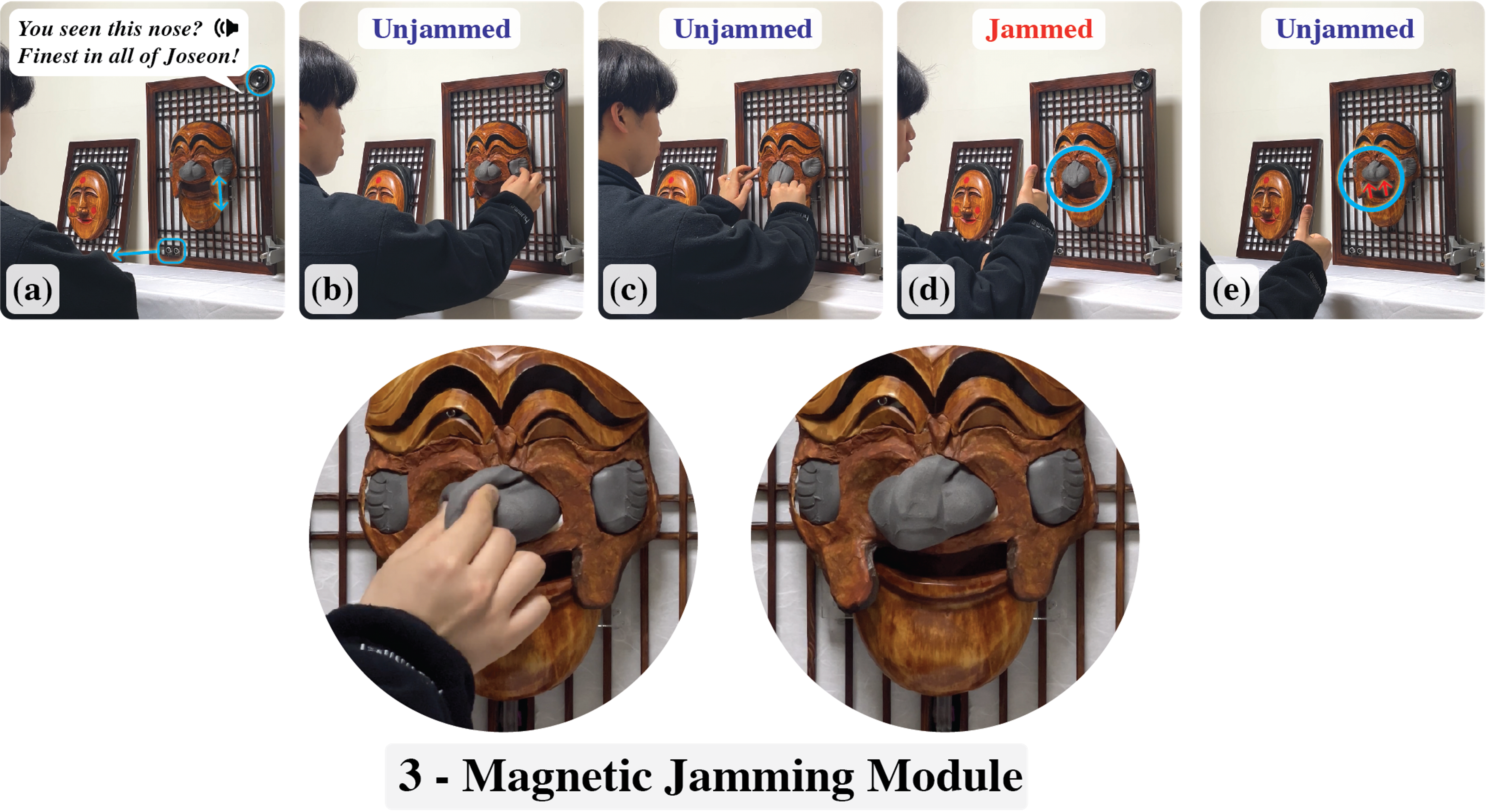
- Presented a 3D tangible display robot artwork inspired by the Korean Hahoetal mask, combining magnetic jamming mechanics with traditional design (Ahn et al., 2025).
- Enabled audiences to interactively explore changes in stiffness and form through touch, movement, and sound, transforming static art into a dynamic experience.
- Engaged with 100+ visitors over 4 hours, demonstrating both the artistic piece and a soft gripper experiment to highlight the technical aspects of magnetic jamming.
- Project website: Jamming Tangible Display

Arts in Robotics – tangible display robot artwork inspired by the Korean Hahoetal mask.
- Day 2 – Workshop Presentation: Handy Moves (May 19, 2025, 09:00–17:30)
- Delivered a poster presentation:
Chanyoung Ahn, Sungwoo Park, Donghyun Hwang,
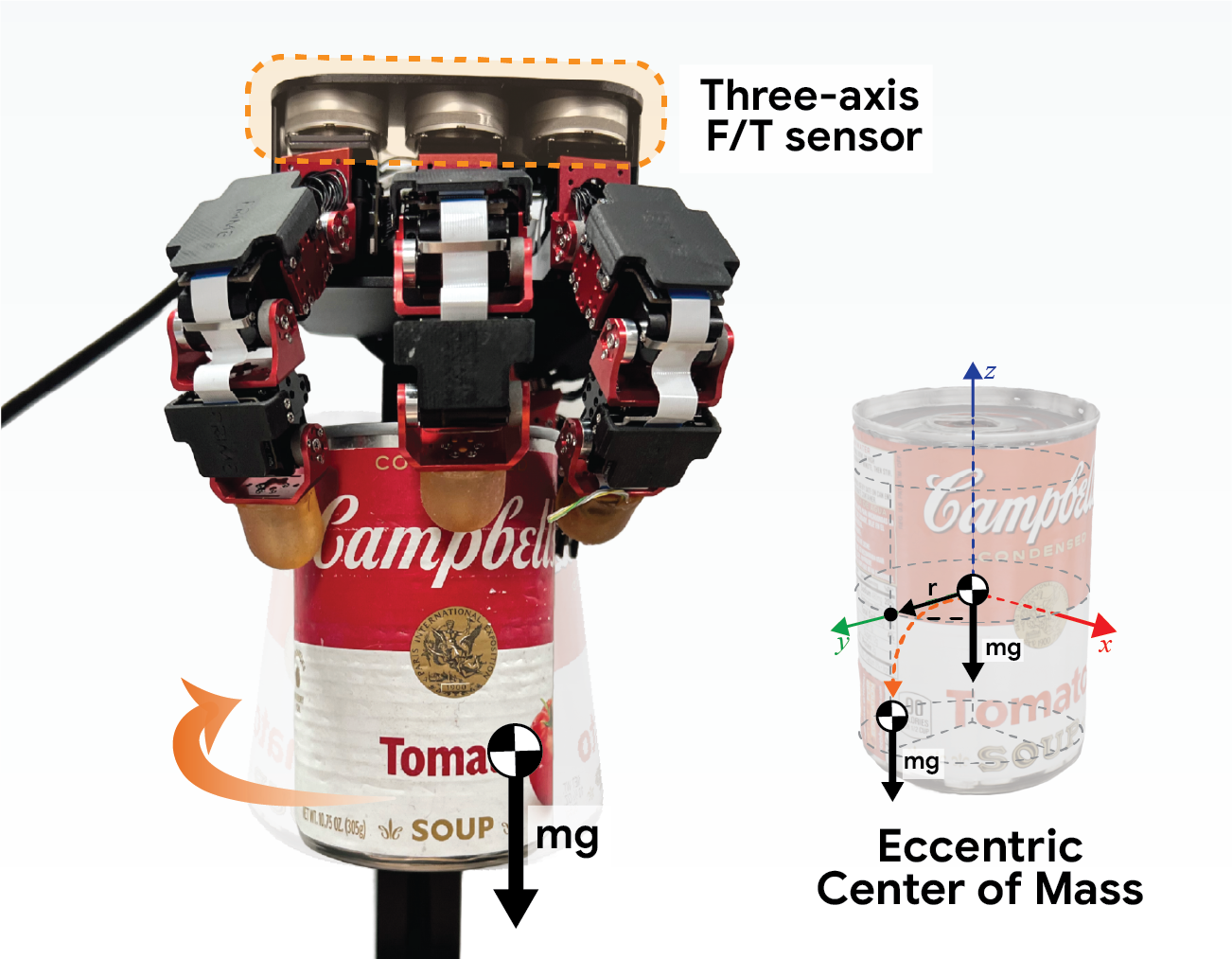
“Effectiveness of Kinesthetic Sensing in In-Hand Rotation of Objects with an Eccentric Center of Mass” (Ahn et al., 2025) - Investigated how kinesthetic feedback (joint force/torque sensing) improves dexterous manipulation of objects with varying mass and eccentric centers of mass.
- Results: With PCA and RL, kinesthetic sensing improved manipulation performance by up to 2.4× on unseen objects.
- Confirmed that heavier and more unbalanced objects especially benefit from kinesthetic feedback.
- Discussed results during two 40-minute Q&A sessions; audience questions focused on real-world validation and comparisons with tactile sensing.
- Project website: Kinesthetic Rotation
- Delivered a poster presentation:

Workshop Handy Moves – poster presentation on kinesthetic sensing for dexterous manipulation.
- Impressions and Insights from ICRA 2025
- Gained valuable opportunities for communication with international researchers and observed current challenges in dexterous manipulation—particularly the sim-to-real gap when using tactile and multimodal sensing.
- Notable research highlights:
- GET-Zero (Graph Embodiment Transformer): Achieves zero-shot skill transfer across 44 robot hands with different DOFs and finger lengths using graph-structured Transformer encoding of joint geometry.
- In-Hand Translation with Shear and Normal Force Sensing: Introduces ternary shear force sensing to better capture slip dynamics, enabling zero-shot sim-to-real transfer for manipulation of diverse cylindrical objects.
- These works will directly inspire the integration of geometric structure and shear-aware tactile modeling into our lab’s multimodal sensing research.
Paper Review: Get-Zero
GET-Zero (Graph Embodiment Transformer): After studying this work—which achieves zero-shot skill transfer across 44 robotic hands via graph-structured joint-geometry encoding—I led a paper review and Q&A session with 8 participants at KIST PRIME Lab.