Chanyoung Ahn
Robotics | Mechanical Engineering

관심 분야: Deformable Object Manipulation (DOM), Aerial Robotics and Sensor Fusioin
안녕하세요, 저는 로봇 엔지니어 안찬영 입니다! 저는 2024년 KAIST RIRO Lab에서 연구를 진행하며, 로보틱스 프로그램 석사학위를 취득했습니다. 석사과정동안 로봇 매니퓰레이션, 특히 비정형 물체 조작을 위한 시뮬레이션 기반 제어 연구를 진행해왔습니다.
학부 과정으로는 2021년 부산대학교의 기계공학부를 최우등졸업 하였습니다. 저의 하드웨어적인 지식과 소프트웨어적인 지식을 바탕으로 로봇의 시스템/제어 연구에 기여하고 싶습니다.
저의 주요 관심 분야는, 매니퓰레이터와 비행체 로봇 제어를 위한 시스템 구현입니다. 특히, 시뮬레이션 내에서 강화학습/전통적인 제어 방법을 활용해 학습하는 것에 관심을 가지고 앞으로도 이 분야의 연구를 진행하고 싶습니다.😊
지금까지는 시촉각 센서를 활용한 매니퓰레이터 로봇 제어 연구를 진행해왔지만, 더 나아가 드론과 UAM과 같은 비행체 로봇을 제어하는 것에도 매우 관심을 가지고 있습니다.
궁극적으로는, 저의 기술을 바탕으로 사람들의 불편을 해소하도록 돕는 로봇 제어 방법을 연구하고 기여하고 싶습니다. 개인적인 꿈은 화성과 같은 외계 천체 탐사를 위한 프로젝트에 제가 도움이 되는 것입니다.
News
| Jun 17, 2026 | Our paper, “KineFuse: Kinematic-Aware Haptic Fusion for In-Hand Occluded-Object Pose Tracking,” has been accepted to IROS 2026! |
|---|---|
| Feb 06, 2026 | Presented a poster at KRoC 2026 in South Korea: “Object Invisible Property Estimation with Multimodal Haptic Data of Multi-fingered Robotic Hand”. |
| Feb 05, 2026 | Invited talk KRoC 2026 in South Korea: “Haptic Feedback-Based In-Hand Manipulation of Objects with Non-Uniform Properties”. |
| Oct 31, 2025 | Presented my ongoing work “Haptic Feedback-Based In-Hand Manipulation of Objects with Non-Uniform Properties” at KRoC workshop 2025. |
| Sep 19, 2025 | My paper Vision-Free Object 6D Pose Estimation for In-Hand Manipulation via Multi-Modal Haptic Attention was accepted as a spotlight at the CoRL 2025 Workshop on Dexterous Manipulation! 🔥 |
Publications
-
 ConferenceOverview of the proposed multimodal haptic framework for object property estimation and grasp stability predictionUnder review Jan 2026
ConferenceOverview of the proposed multimodal haptic framework for object property estimation and grasp stability predictionUnder review Jan 2026 -
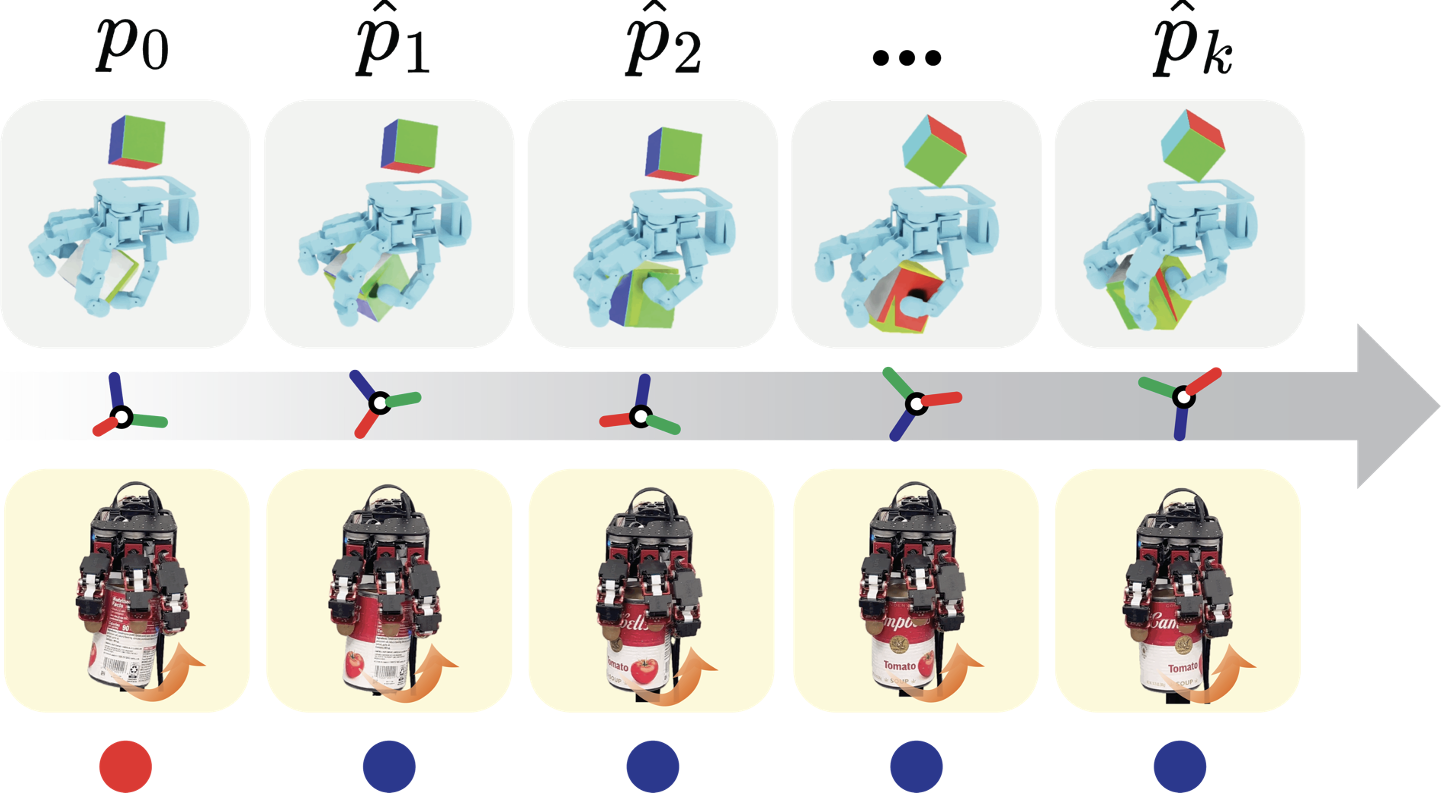
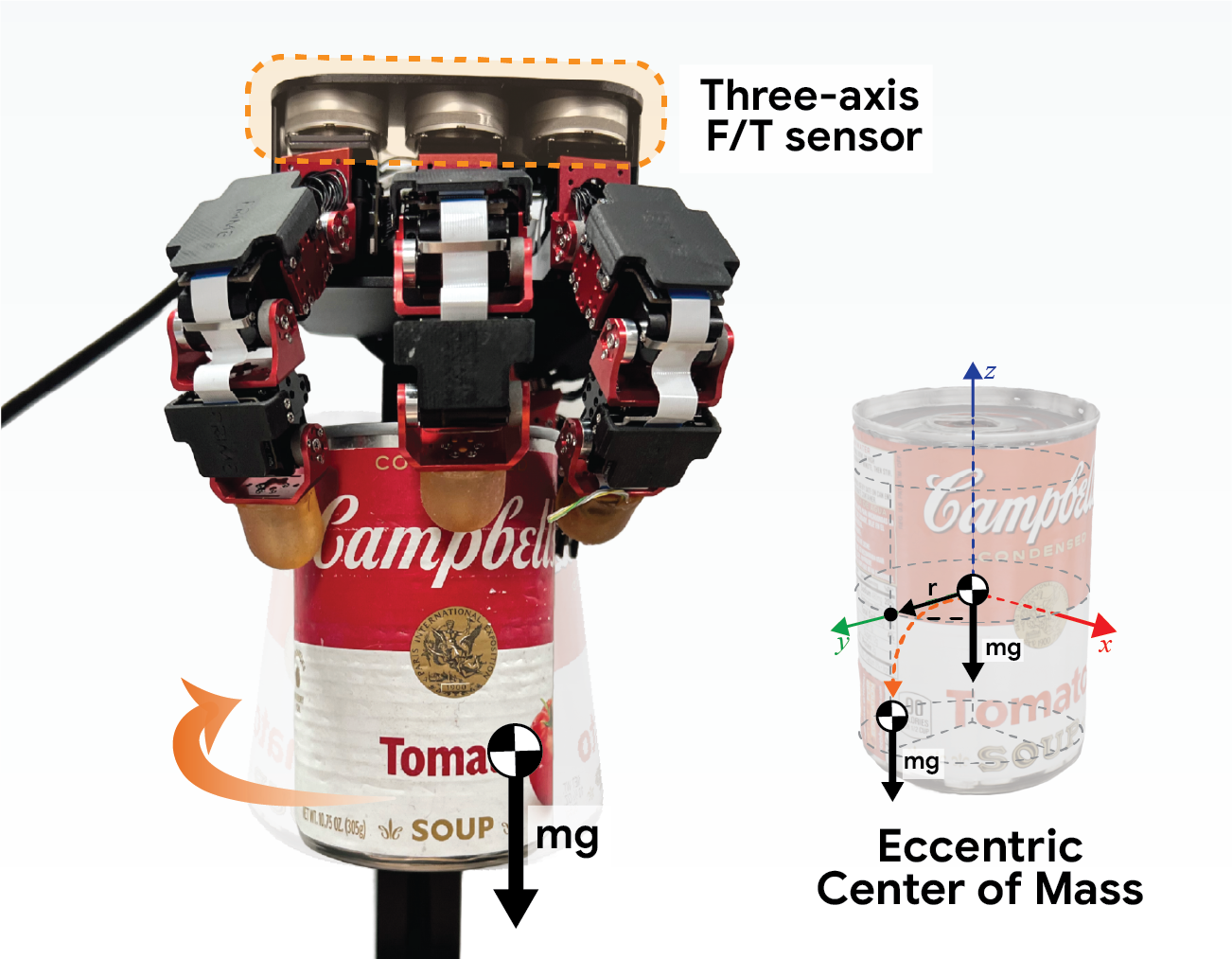
 ConferenceKineFuse: Kinematic-Aware Haptic Fusion for In-Hand Occluded-Object Pose TrackingIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Jan 2026
ConferenceKineFuse: Kinematic-Aware Haptic Fusion for In-Hand Occluded-Object Pose TrackingIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Jan 2026