Chanyoung Ahn
Research Scientist | Center for Humanoid Research, KIST

I am a research scientist at Korea Institute of Science and Technology (KIST), building end-to-end platforms for contact-rich manipulation with multi-fingered hands. My work asks how robots can infer latent physical properties—such as mass, center of mass, stiffness, and contact state—from multimodal haptic signals and use them to perform robust dexterous and tool-based manipulation when vision is occluded or unreliable.
Currently, I develop haptics-first in-hand and bimanual manipulation systems that combine joint, force/torque, and tactile sensing with learned state representations and reinforcement learning policies. Previously, I completed my M.S. in Robotics at Korea Advanced Institute of Science and Technology (KAIST), where I built visuotactile RL testbeds for deformable object manipulation, and my B.Eng. in Mechanical Engineering at Pusan National University (Summa Cum Laude).
Research interests
Contact-rich dexterous manipulation · Multisensory haptics & kinesthetic perception ·
Physical property estimation from touch · Reinforcement learning and sim-to-real for manipulation
E-mail | CV | GitHub | LinkedIn | YouTube
News
| Oct 31, 2025 | Presented my ongoing work “Haptic Feedback-Based In-Hand Manipulation of Objects with Non-Uniform Properties” at KRoC workshop 2024. |
|---|---|
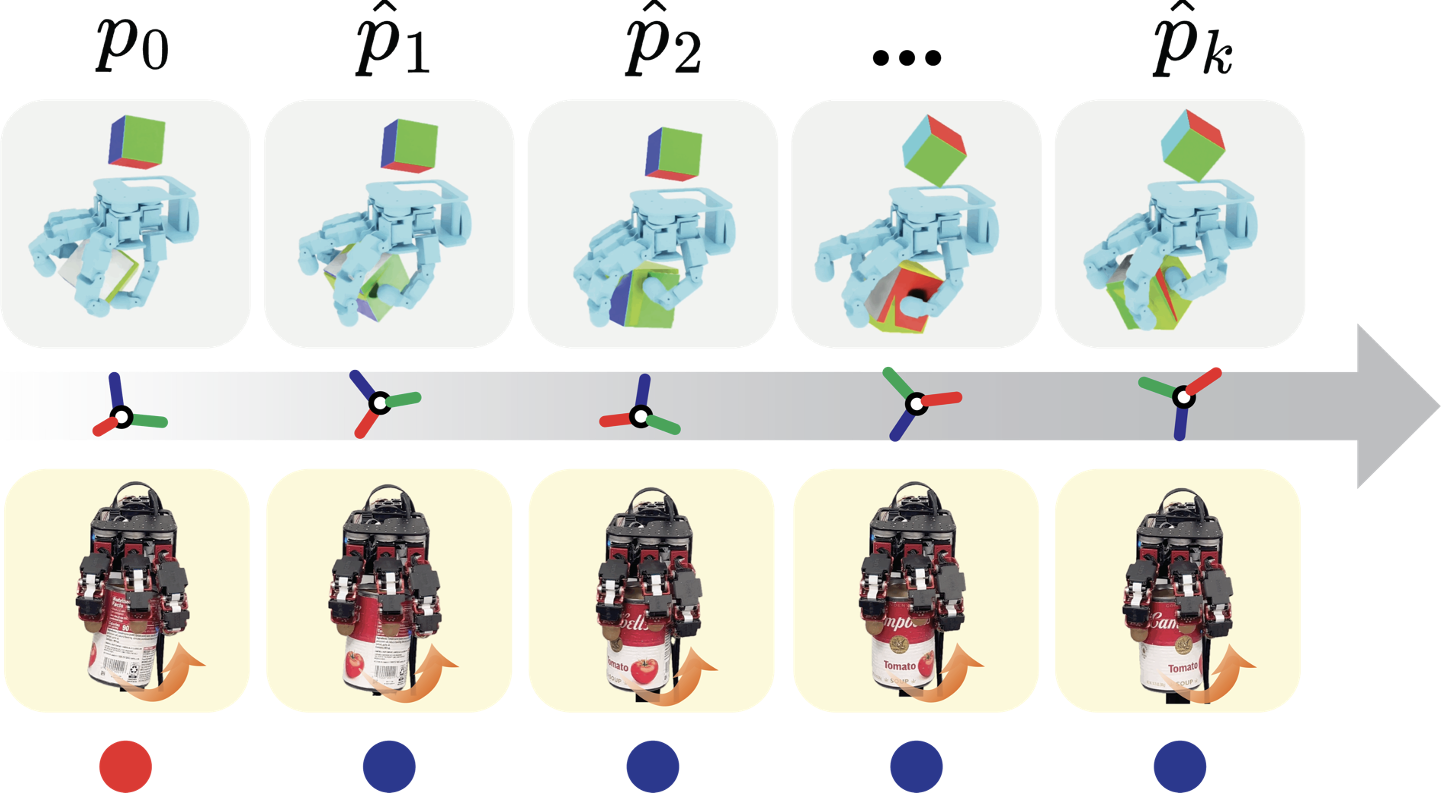
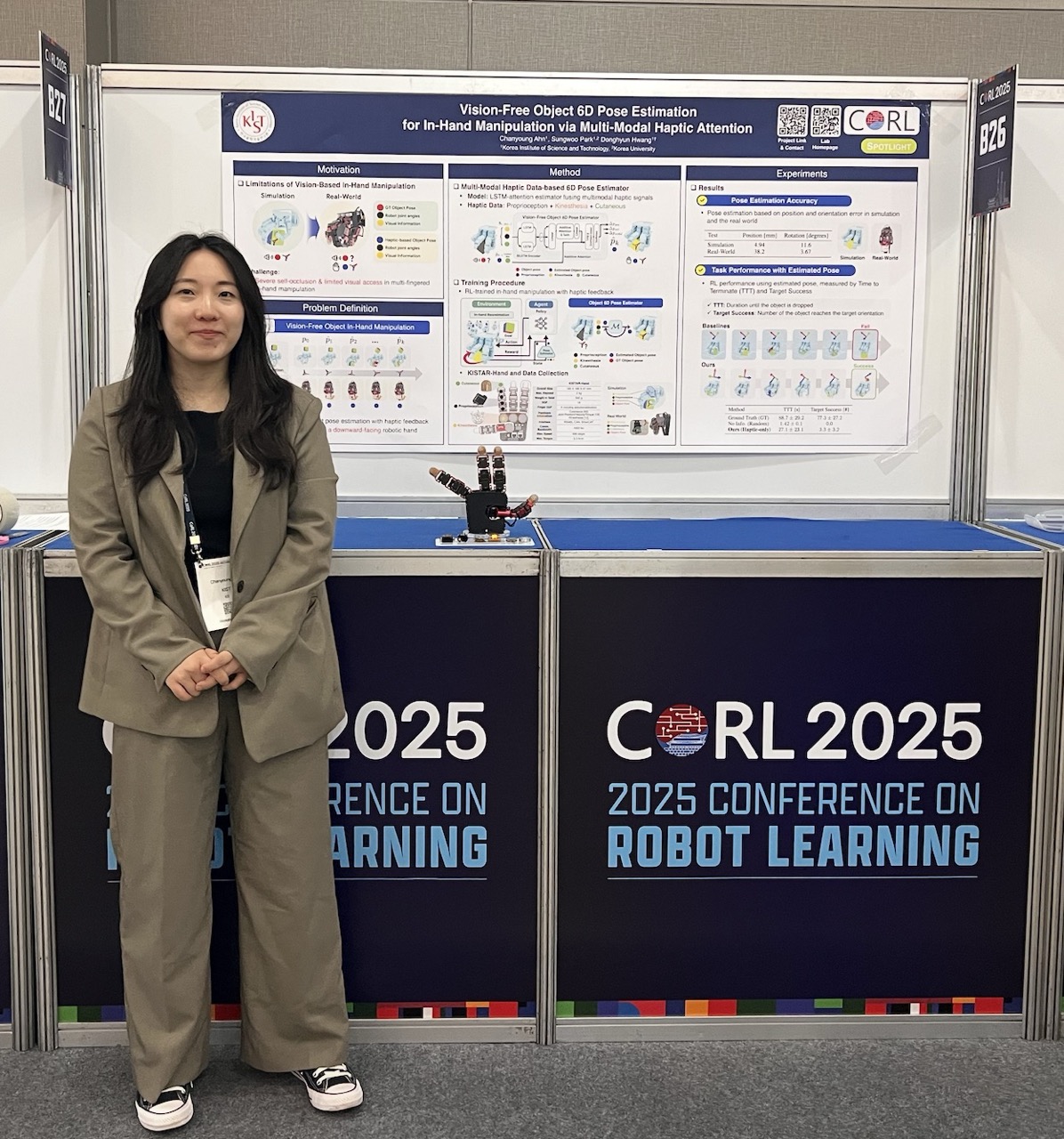
| Sep 19, 2025 | My paper Vision-Free Object 6D Pose Estimation for In-Hand Manipulation via Multi-Modal Haptic Attention was accepted as a spotlight at the CoRL 2025 Workshop on Dexterous Manipulation! 🔥 |
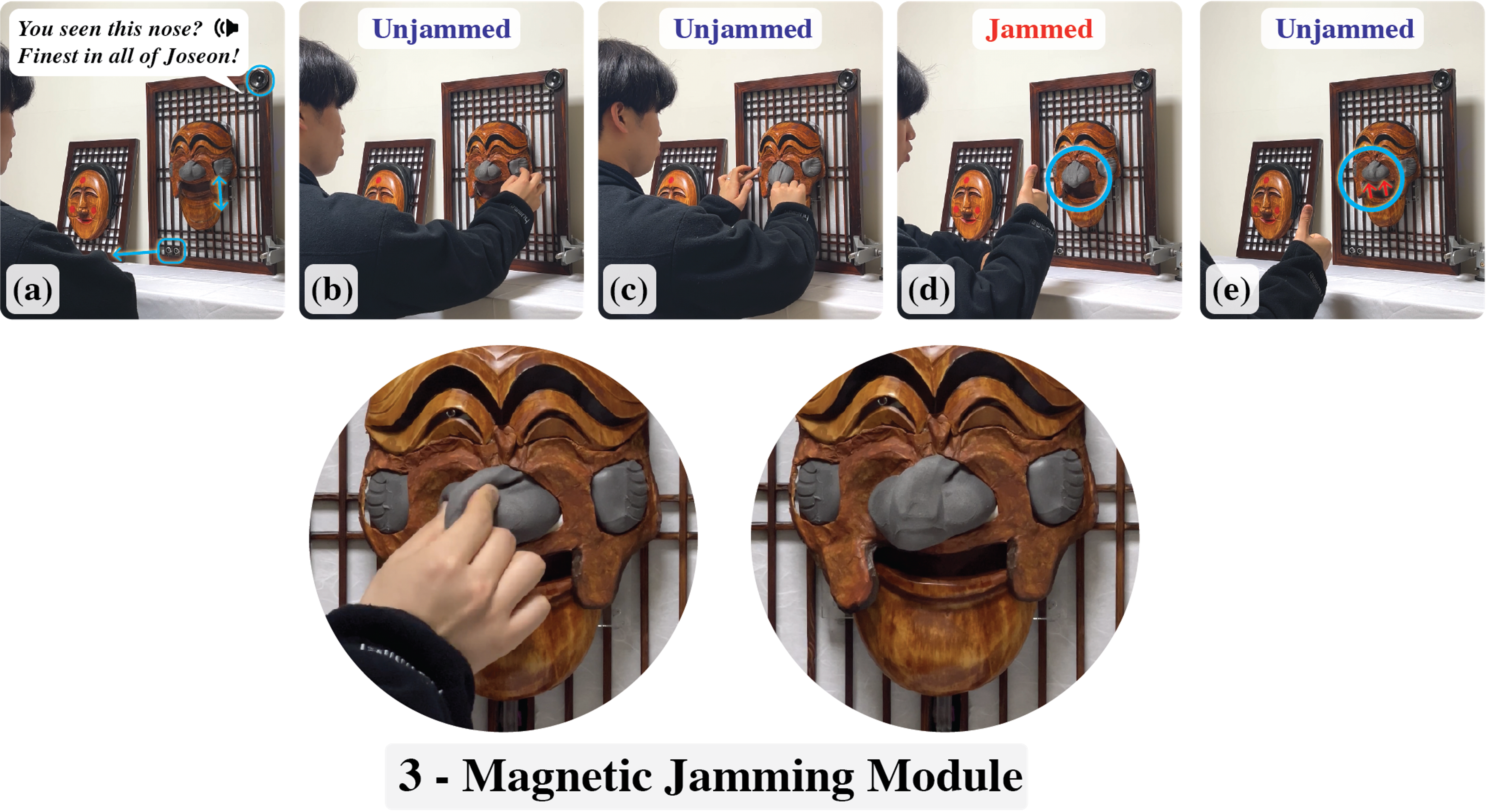
| May 20, 2025 | Attending ICRA in Atlanta to present 3D Tangible Display with a High-Speed Stiffness-Variable Jamming Module at the Arts in Robotics exhibition! |
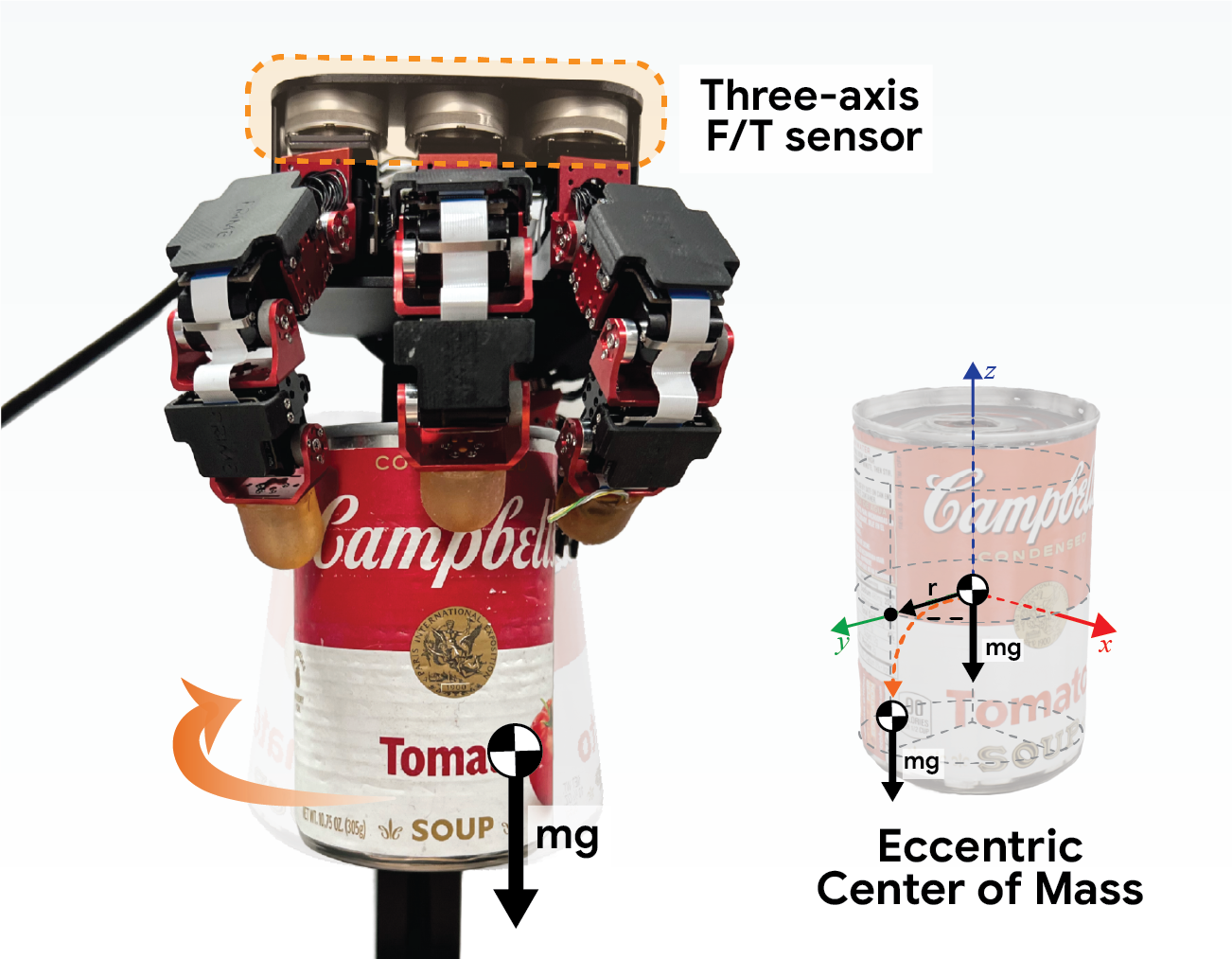
| May 19, 2025 | Attending ICRA in Atlanta to present Effectiveness of Kinesthetic Sensing in In-Hand Rotation of Objects with an Eccentric Center of Mass at the workshop (Handy Moves: Dexterity in Multi-Fingered Hands)! |
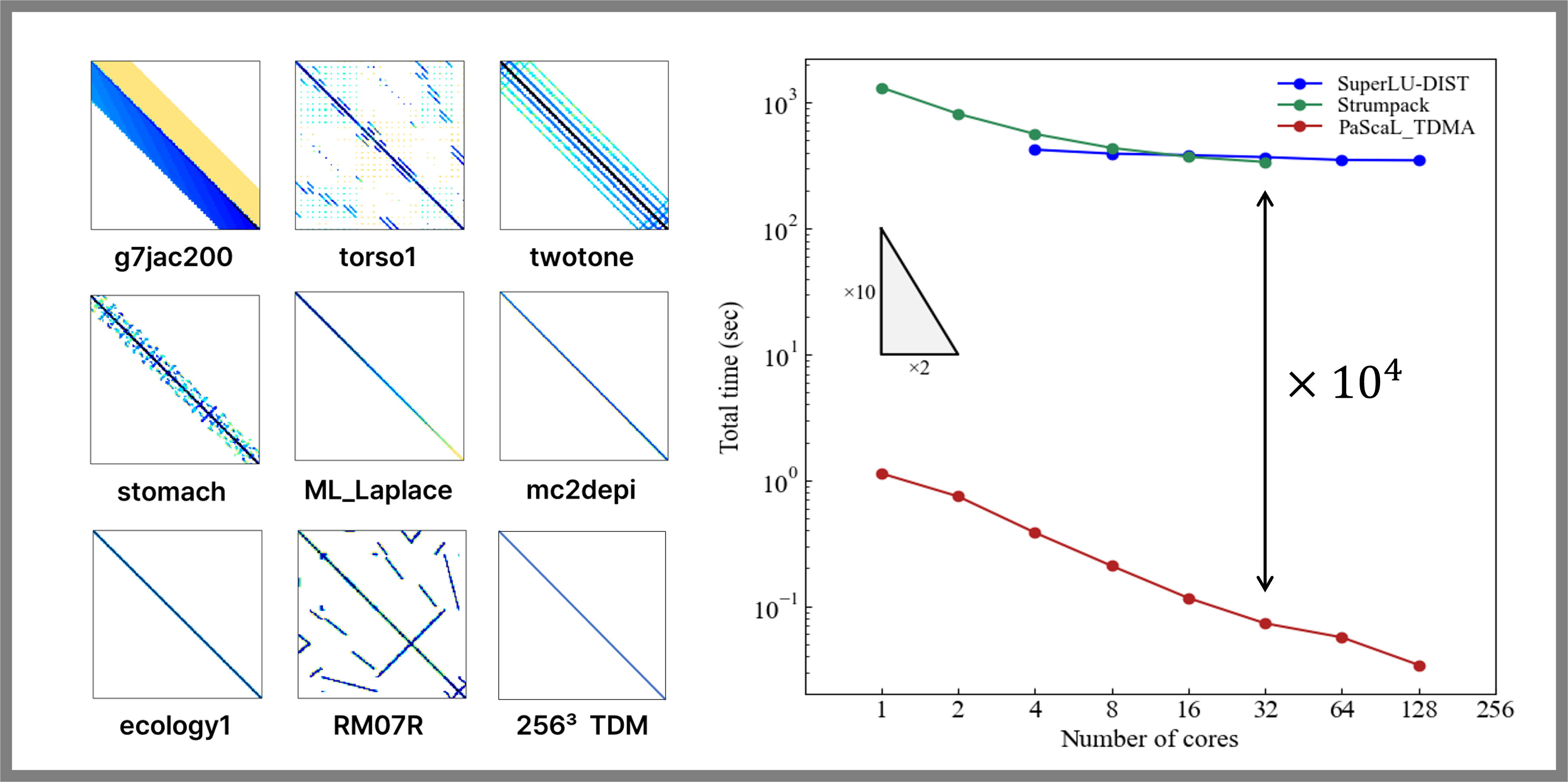
| Aug 22, 2024 | Presented a poster on the Parallel Performance Benchmark project with KISTI at CDE 2024. |
Work Experience
| | Korea Institute of Science and Technology (KIST) Research Scientist | Nov. 2024 - Current |
Education
| | Korea Advanced Institute of Science and Technology M.Sc in Robotics | 2021 - 2024 |
| | Pusan National University B.Eng in Mechanical Engineering | 2016 - 2021 |
Current Projects

Robotics & Learning
-
 Project6-DoF Grasp Generation for Mobile ManipulationCS492_IIR Final Project @ KAIST Jan 2021
Project6-DoF Grasp Generation for Mobile ManipulationCS492_IIR Final Project @ KAIST Jan 2021